Summary
這份總結架構將機器人學拆解為「目的、身體、大腦」三個核心維度,定義了機器人系統的設計邊界與核心權衡 (Trade-offs)。
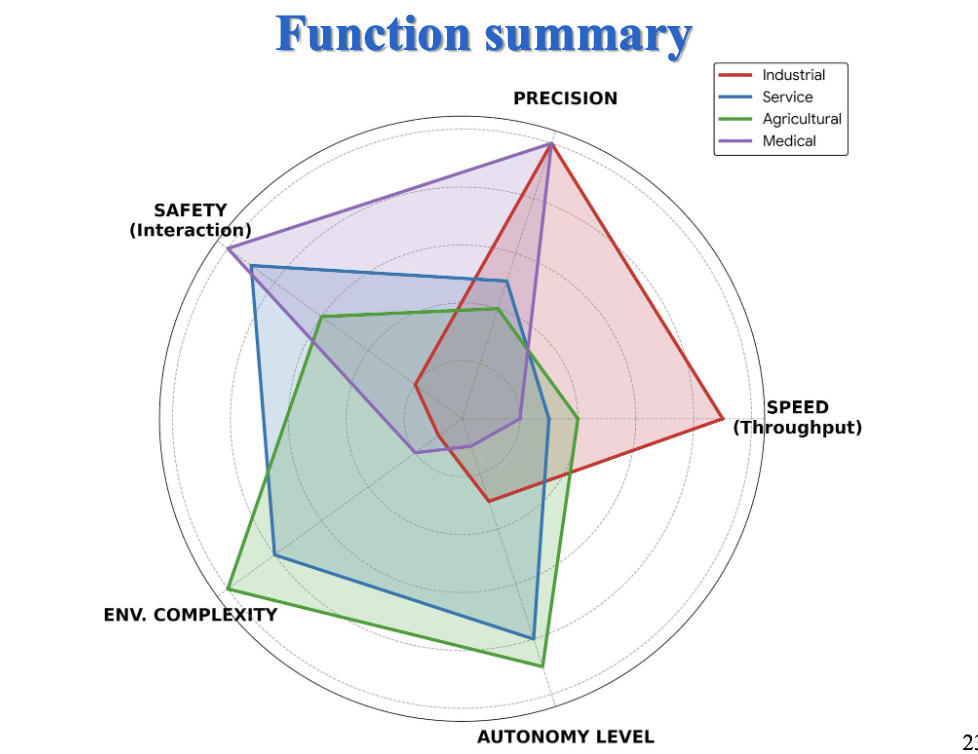
🎯 Dimension 1: Function (The “Why”)
核心邏輯:用途決定設計。
-
工業機器人 (Industrial):
-
核心目標:Maximize Performance。
-
追求極致的重複精度與循環時間 (Cycle time)。
-
-
物流與探索機器人 (Logistics / Exploration):
-
核心目標:Maximize Availability。
-
強調在非結構化環境中的生存與持續運作能力。
-
-
服務與醫療機器人 (Service / Medical):
-
核心目標:Minimize Risk。
-
安全性高於一切,確保在與人互動時零傷害。
-
🦾 Dimension 2: Kinematics (The “Body”)
核心邏輯:形態決定運動。
A. 移動能力 (Locomotion)
-
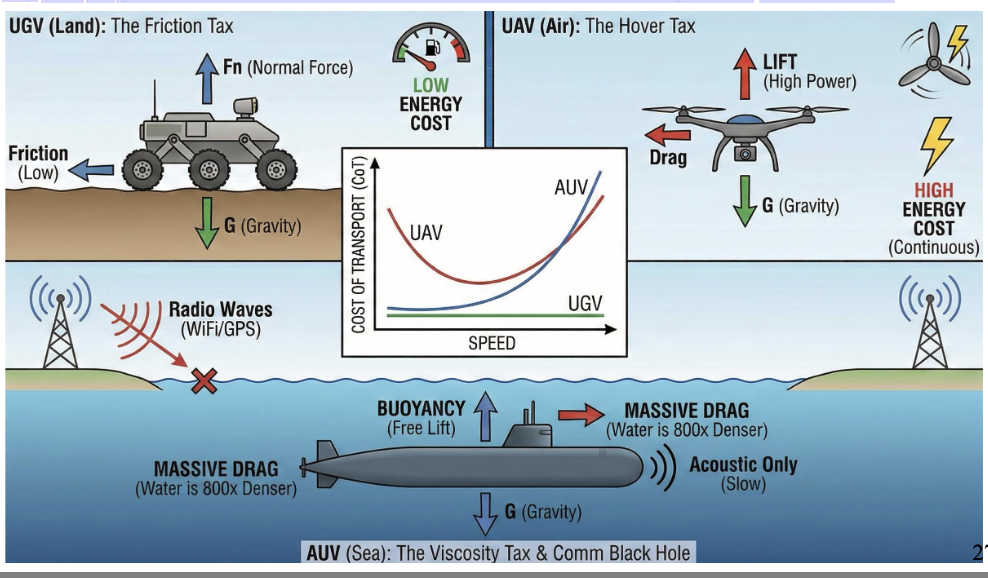
效率 vs. 靈活性 (Efficiency vs. Agility):
-
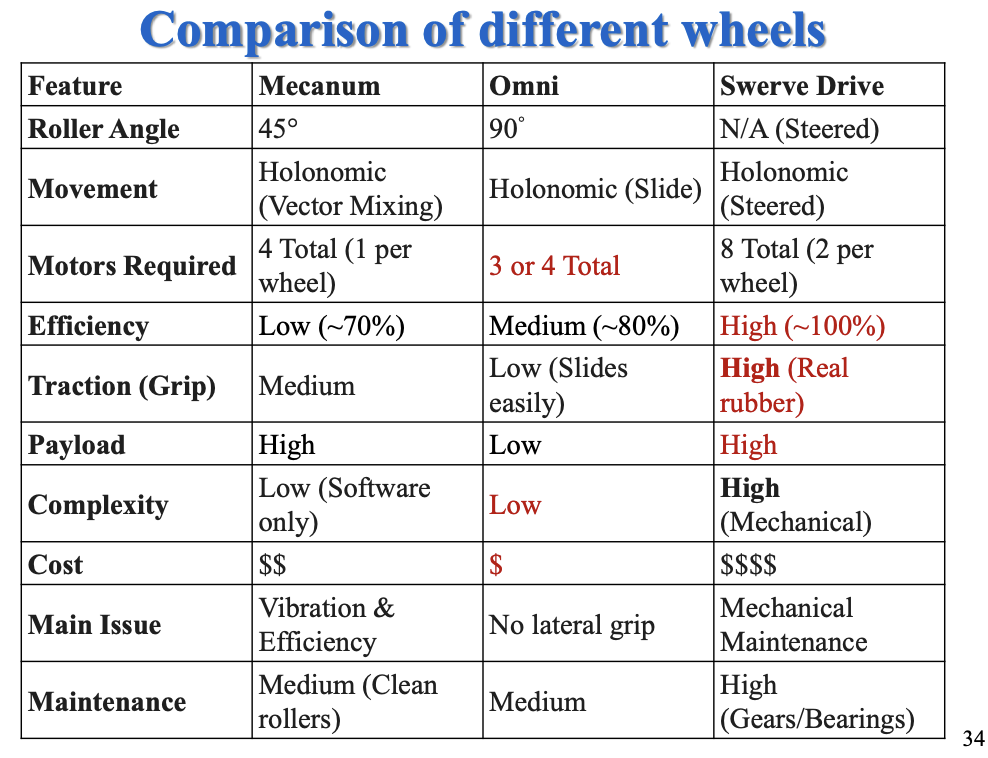
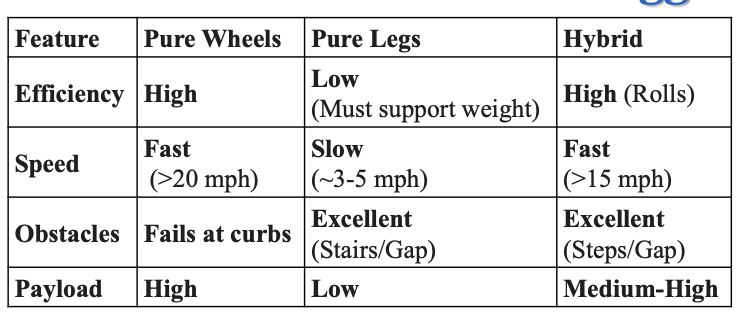
輪式 (Wheels):高效率,但在崎嶇地形無力。
-
足式 (Legs):極高靈活性(跨越障礙),但站立即耗能。
-
-
底座類型:
-
固定式 (Fixed):定義明確的工作空間 (Workspace)。
-
移動式 (Mobile):無邊界的配置空間 (Configuration space)。
-
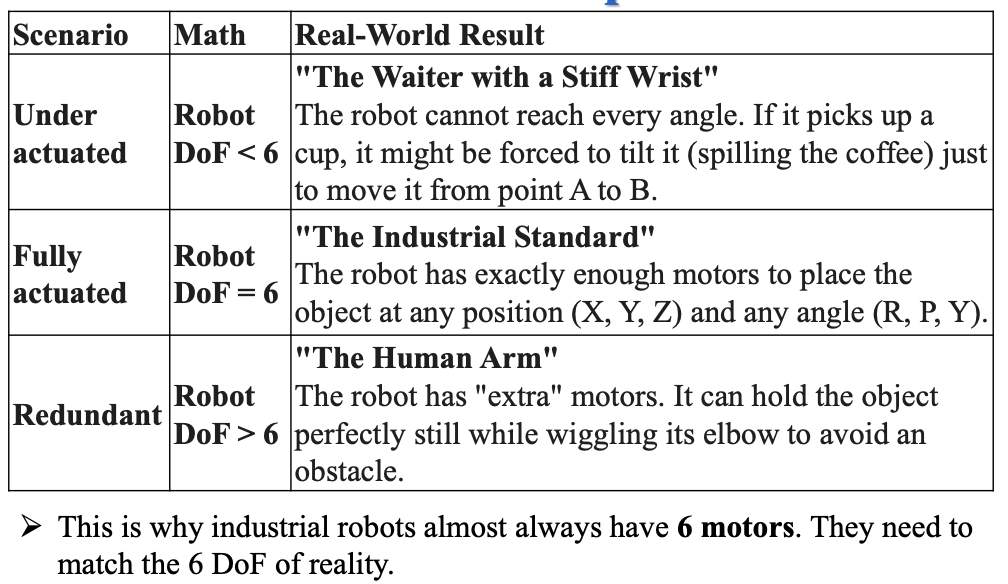
B. 操作能力 (Manipulation)
-
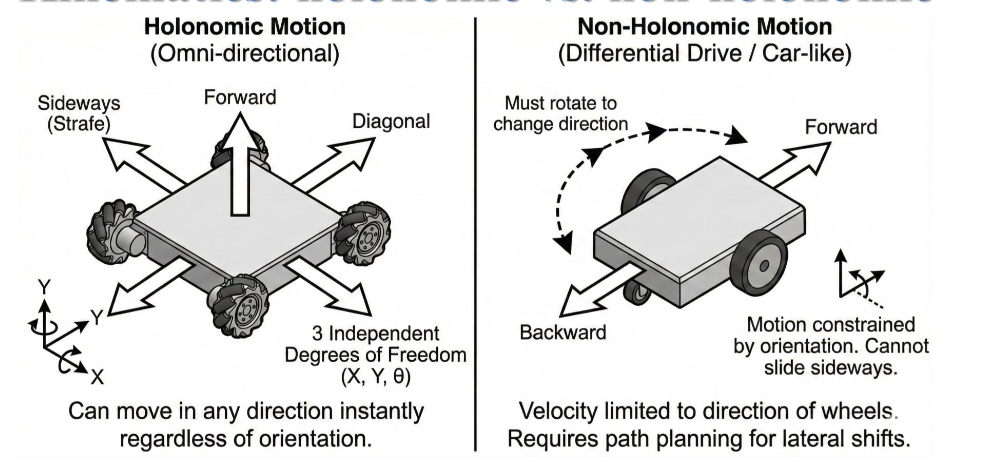
自由度對接:必須將機器人的 DoF (Degrees of Freedom) 與現實空間的 6 DoF 進行匹配。
-
冗餘 (Redundancy):超過 6 軸的設計可提供繞過障礙與避免奇異點的能力。
🧠 Dimension 3: Autonomy (The “Brain”)
核心邏輯:感知決定決策。
A. 控制架構
-
智能 vs. 速度 (Intelligence vs. Speed):
-
審慎式 (Deliberative/Planning):高智能,但反應慢(適合複雜路徑規劃)。
-
反應式 (Reactive):極速反應,但缺乏長遠規劃(適合避障)。
-
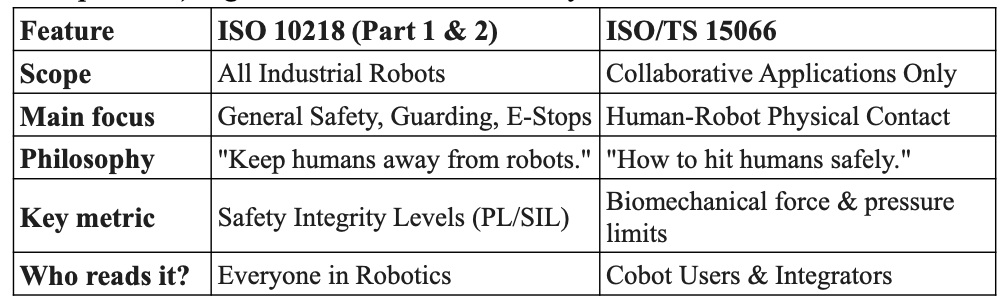
B. 人機協作與安全 (Safety Standards)
-
法規基石:依循 ISO 10218 與 ISO/TS 15066。
-
共存技術:
- 從「完全隔離」演進到「動態監測 (SSM)」與「力量限制 (PFL)」,實現真正的 Shared Workspace。
📊 綜合對比表 (Systematic Overview)
| 維度 | 關鍵字 | 核心權衡 (Trade-off) |
|---|---|---|
| D1: Function | 目的 (Purpose) | 效能 (Performance) vs. 風險 (Risk) |
| D2: Kinematics | 物理 (Physics) | 效率 (Efficiency) vs. 靈活 (Agility) |
| D3: Autonomy | 智能 (Intelligence) | 規劃 (Planning) vs. 反應 (Reaction) |
🔗 關聯筆記
kinematics